|
Florian Wolf
Hi, I am a PhD student in Applied and Computational
Mathematics (ACM) at Caltech,
working with Prof. Andrew Stuart
and supported by the
Kortschak Scholars Program Fellowship.
Industry. This summer, I am working with Prof. Michael Mahoney at the Amazon AWS AI Labs . Before joining Caltech, I was an intern at Amazon Robotics in the Vulcan Pick Team. Between Bachelor's and Master's, I was interning at Mercedes-Benz. Education. I hold Master's degrees in Mathematics and Computational Engineering from TU Darmstadt. For my thesis, I worked on Hidden Convex Optimization with Functional Constraints in the Optimization and Decision Intelligence Group at ETH Zürich, supervised by Prof. Niao He. During my studies, I was honored to be a fellow of the German Academic Scholarship Foundation ("Studienstiftung") as well as the Swiss National Centre of Competence in Research (NCCR) Automation. |

|
Thesis / Project supervision:If you're passionate about research and interested in working with me, I'm always happy to hear from motivated students. If you'd like to get involved, please reach out with a summary of your research interests, along with your up-to-date CV and academic transcript. |
|
|
Global Optimality for Constrained Exploration via Penalty Regularization
Florian Wolf, Ilyas Fathkullin, Niao He Under Review, 04/2026 European Workshop on Reinforcement Learning (EWRL) 2026, 10/2026 (oral paper) While maximum-entropy exploration is central to RL, real-world applications are often hindered by safety constraints and a lack of additive structure. We propose Policy Gradient Penalty (PGP), a single-loop method that enforces general occupancy-measure constraints via quadratic penalty regularization. By leveraging hidden convexity, we provide the first global last-iterate convergence guarantees for this non-convex setting. |
|
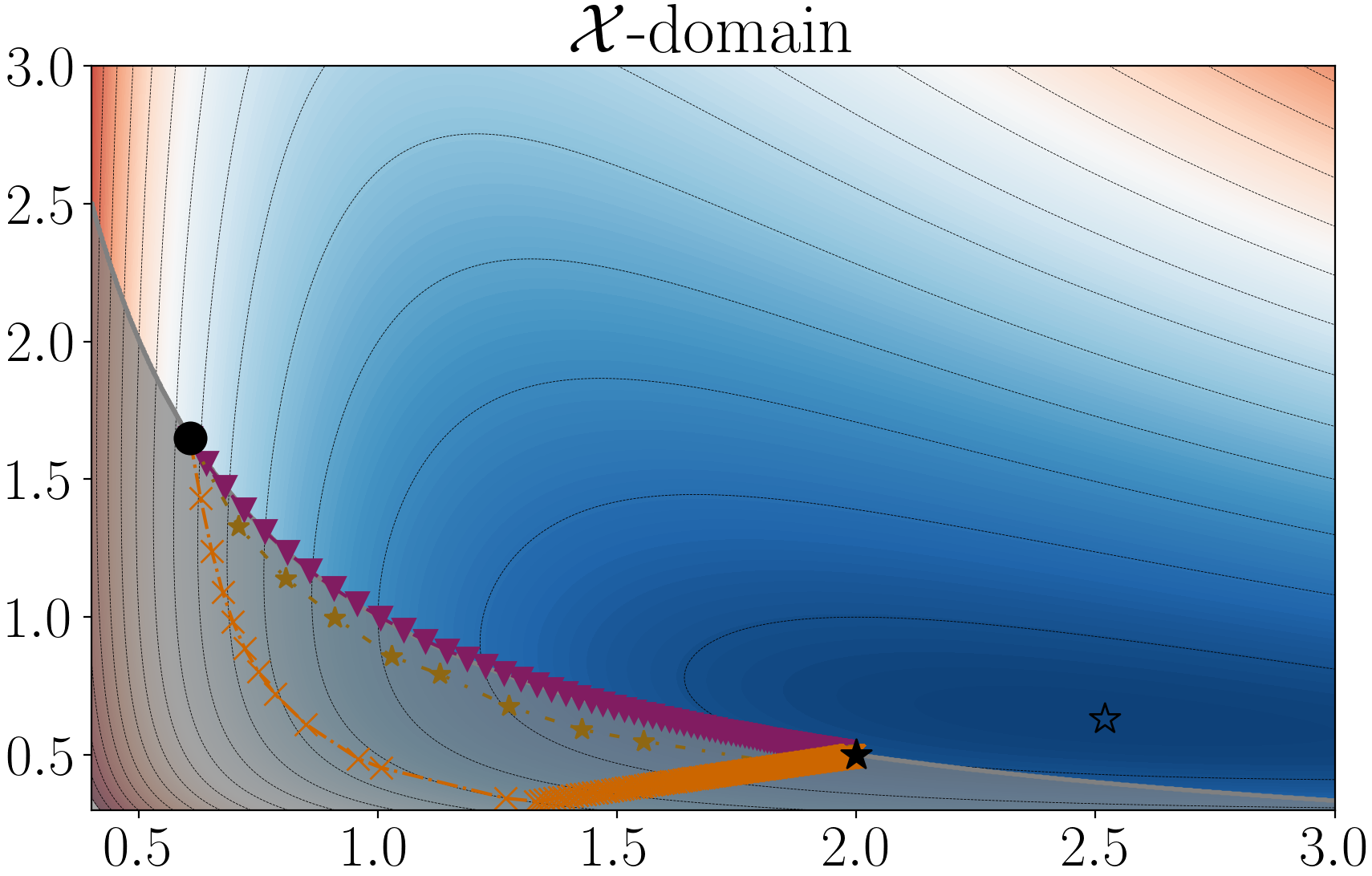
Global Solutions to Non-Convex Functional Constrained Problems with Hidden Convexity
Ilyas Fathkullin, Niao He, Guanghui (George) Lan, Florian Wolf Submitted to Mathematical Programming (MP), Series A, 11/2025 Workshop on Constrained Optimization for Machine Learning, Neural Information Processing Systems (NeurIPS) 2025, 12/2025 (oral paper for best fundamental contribution) Code: https://github.com/Flo-Wo/HiddenConvexityCode First algorithms with provable global guarantees for constrained non-convex optimization via hidden convexity. Our methods bypass constraint qualifications, handle hidden convex equality constraints, and work directly with gradient oracles in the non-convex space. Applications include safe control and reinforcement learning, where we establish global optimality and oracle complexities matching unconstrained hidden convex optimization. |
|
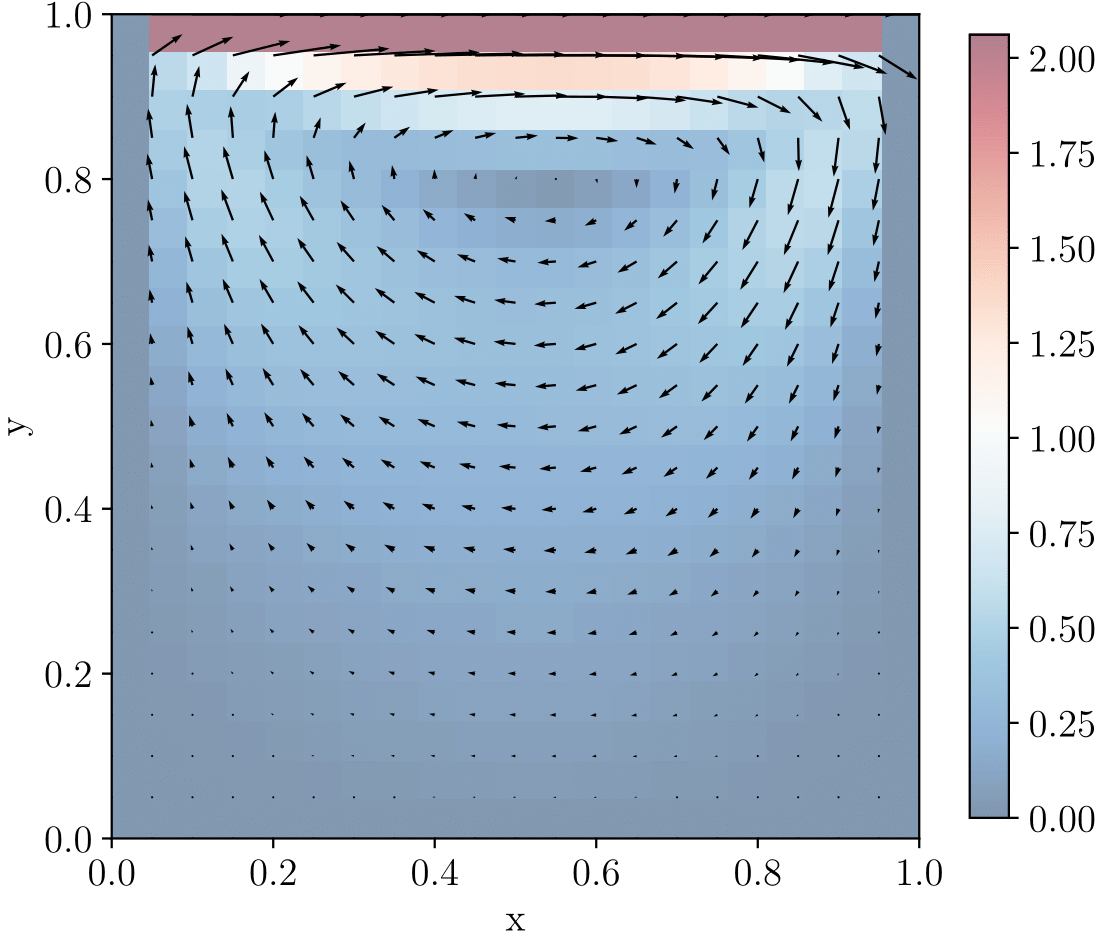
Interpretable and Efficient Data-driven Discovery and Control of Distributed Systems
Florian Wolf, Nicolò Botteghi, Urban Fasel, Andrea Manzoni Data-Centric Engineering, Cambridge University Press, 11/2025 Code: https://github.com/Flo-Wo/AE-SINDy-C AE+SINDy-C: a data-efficient, interpretable, and scalable Dyna-style Model-Based RL framework for PDE control, combining SINDy-C with autoencoders for dimensionality reduction. Applied to the 1D Burgers and 2D Navier-Stokes equations, the method enables fast rollouts, reduces environment interactions by up to 10x, and yields an interpretable latent dynamics model, outperforming a model-free baseline. |
|
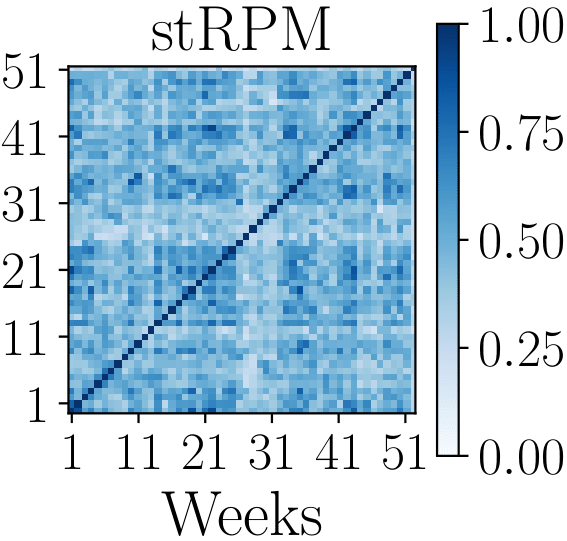
Spatio-temporal clustering of PM2.5 in northern Italy using a Bayesian model
Florian Wolf, Alessandro Carminati, Alessandra Guglielmi Scientific Meeting of the Italian Statistical Society, 06/2024 (oral paper) Bayesian spatio-temporal product partition model to cluster PM2.5 air quality data from multiple monitoring stations in Northern Italy, capturing both spatial and temporal patterns. The model outperforms a spatial-only baseline in predictive performance, offering smoother and more insightful pollution trend analysis. |
|
|
Tracking Control for a Spherical Pendulum via Curriculum Reinforcement Learning
Pascal Klink, Florian Wolf, Kai Ploeger, Jan Peters, Joni Pajarinen Submitted to Transactions on Robotics (T-RO), 09/2023 Website: https://sites.google.com/view/pendulumacrobatics/ip2-real-system Automated curriculum generation with massively parallel RL learns a spherical pendulum tracking controller, leveraging the task's non-Euclidean structure for faster convergence, higher performance, and successful sim-to-real transfer. |
|
The website is based on the code from Jon Barron |